













Navident, cirugía guiada por navegación dinámica
Navident
Cirugía Guiada por Navegación Dinámica
Solicita una demostración
Descripción
Navident, cirugía guiada por navegación dinámica
Cirugía en un día
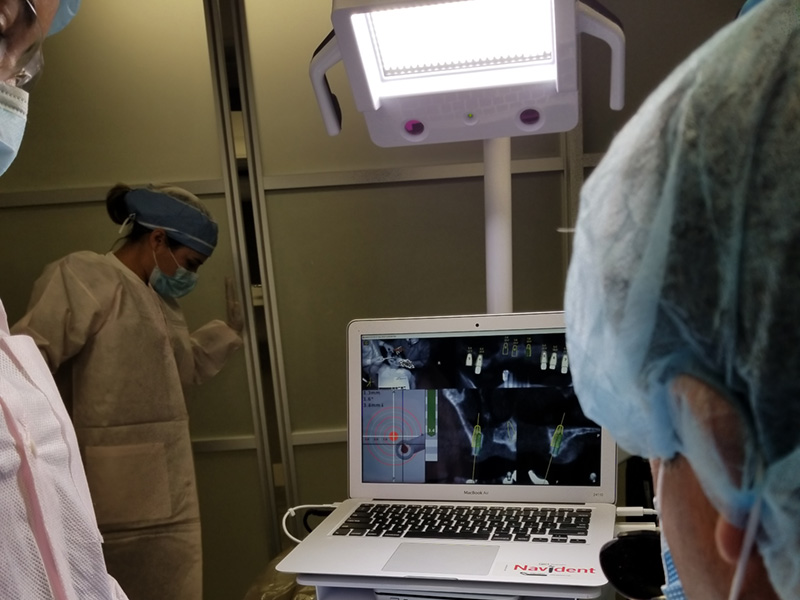
Navident es un sistema de navegación dinámica: cirugía guiada por imágenes en tiempo real para diferentes prácticas dentales (Claronav, Canada)
Sin necesidad de fabricación de guías quirúrgicas.
Compatible con cualquier tipo de implante, sistema de fresa y todos los TAC-3D CBCT actuales en el mercado.
Cualquier CBCT reciente puede utilizarse para Navident, sin tener que realizar doble TAC-3D
El cirujano ve en tiempo real el avance de los instrumentos, posición y angulación exactas.
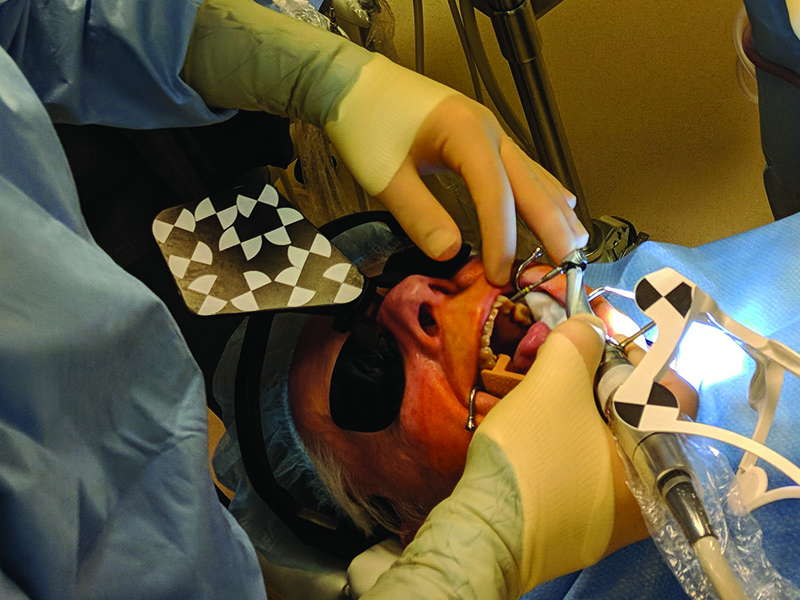
Facilita y ofrece seguridad en técnicas especiales como la colocación de implantes pterigoideos.
Planificación precisa en pacientes edéntulos con protocolo sencillo y preciso.
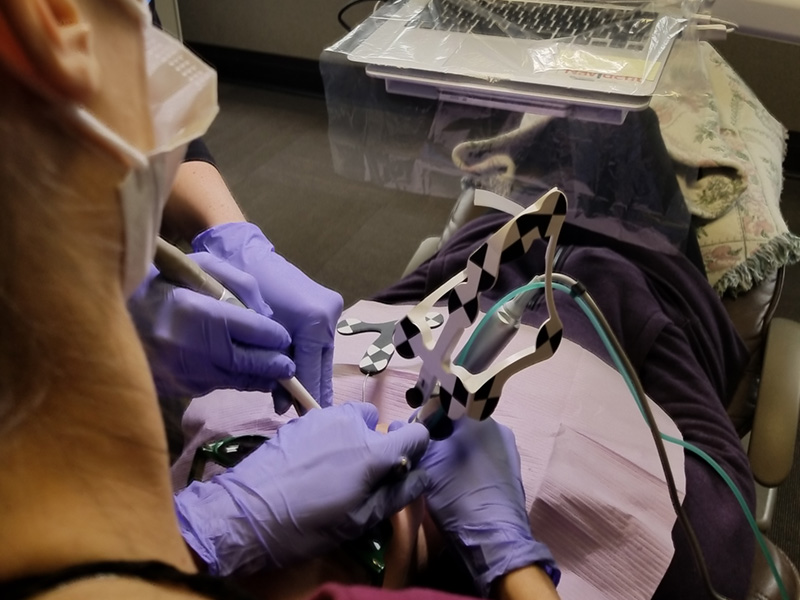
Gran variedad de Instrumental de Rastreo para adaptar a cada caso.
Etiquetas de detección reutilizables (esterilización en autoclave).

Pasos sencillos con protocolo TaP (Trace and Place) para una planificación precisa y rápida.
Los datos de un TAC 3D CBCT reciente se importan en el portátil incluido en el sistema.
Implantología: fácil y rápida planificación para colocación de implantes.
Navident proporciona un seguimiento dinámico de la fresa y la anatomía del paciente, proporcionando guiado y retroalimentación acústica para asegurar que los implantes se colocan acorde con la planificación.

Cirugia con sierra ultrasónica (Piezoeléctrico):
Controla la posición de la sierra al extraer bloques de hueso autólogo (GBR) con gran precisión para no afectar estructuras anatómicas.
Endodoncia:
Cirugía mínimamente invasiva: Guíe sus instrumentos con muy alta precisión con un abordaje mínimo
Un gran avance para la odontología asistida por ordenador.
Navident ofrece a los cirujanos dentales un sistema fácil de usar, preciso y portátil.
Una forma asequible de planificación de implantes y restauración.
Coloque en un paciente virtual, luego ejecute el plan en la mandíbula real del paciente.
A diferencia de cirugía guiada con guía quirúrgica (cirugía guiada estática), en pocos segundos puede modificarse el plan del implante, cambiando ángulo, profundidad, diámetro, etc, para adecuarlo a la anatomía.
Navident facilita las cirugías
Un mejor trabajo en unos pocos pasos:
Planificar el implante basado en la protesis.
Optimizar la posiciones de implantes considerando tanto hueso como coronas.
Deja que Navident te guíe implementando con precisión tu plan en el paciente.
Reduce el daño al paciente:
Realizar cirugía sin colgajo, con reducción de malestar a los pacientes.
Reducir el riesgo de infección y permite recuperación más rápida.
Evitar daño iatrogénico no intencional a estructuras anatómicas cercanas.
Aumenta tu eficiencia:
Eliminar los modelos de yeso, encerados y fabricación de guías quirúrgicas.
Reduce el tiempo de sillón.
Menor costo de tratamiento:
Aprovecha la precisión para reducir la necesidad de pilares personalizados.
Reduce procedimientos de aumento óseo y repetir tratamientos.
Utiliza superestructuras atornilladas en lugar de cementadas.
Tecnología avanzada para su clínica:
Demuestra a los pacientes la capacidad de aprovechar la última tecnología para brindar una atención mejor, más segura y menos invasiva.
Navident ocupa un espacio mínimo en el gabinete.
Relájate y disfruta:
Reduce estrés mental.
Utiliza una nueva y emocionante tecnología.
Aumenta tu satisfacción laboral y extiende tu carrera.
Especificaciones lector 3D MicronTracker
| Descripción | Datos técnicos |
|---|---|
| FOM, sección esférica (radio x ancho x alto) |
200 x 130 x 100 cm |
| Velocidad de medición | 20 Hz |
| Precisión de calibración(1) | 0.35 mm RMS |
| Vibración, blanco estático(2) | 0.015 mm RMS |
| Vibración, blanco estático(2) | 0.14 mm RMS |
| Tiempo/cuadro (2.5GHz Intel Q8300, 4 markers) |
10 ms |
| Retraso | ~50 ms |
| Resolución de sensores | 1024 x 768 |
| Lentes / HºxVº | 6 mm 50ºx38º |
| Dimensiones (AxAxD aprox.) |
164 x 43 x 54 mm |
| Peso (aprox.) | 342 g |
| Interfase eléctrica | IEEE-1394a (FireWire), 400 Mbps |
| Montaje | Trípode roscado 1/4″ |
| Temperatura operación | 18-30º (64-86ºF) |
| Periodo de calentamiento | ~15 minutes |
| Máxima cant. plantillas de marcación | Prácticamente ilimitada |
| Máxima cant. marcadores simultáneos | 100 |
| Rango de iluminación | 50-100000 Lux (20-400000 Lux en modo HDR) |
| Máxima variación de iluminación entre marcadores |
6:1(3) (1000:1 en modo HDR) |
| Certificaciones | IEC 60601-1, FCC Part 15 Clase A, cumple normativa RoHS y WEEE |
| Deriva: temperatura, presión, intensidad luz, orientación marcadores, movimiento borroso, ajustes exposición |
Insignificante |
| Advertencias de riesgos | Marcador fuera de FOM; Inestabilidad térmica; Temperatura fuera de rango; Sombra sobre el blanco |
| Sistema operativo | MS-Windows 7/Win 8/ Winn 10, Linux, 32bit y 64bit |
| Mínimos requerimientos del ordenador | CPU 20GHz, 1 Gb RAM, 1 Gb espacio disco |
(1) Blanco simple (Xpoint), promediadas más de 20000 posiciones a profundidades de 40-100 cm
(2) Blanco simple a profundidad de 75 cm, 150 Lux, obturador 20 ms
(3) El rango puede extenderse a 20:1 con blancos blanco/gris con iluminación brillante


1. Dynamic navigation: a laboratory study on the accuracy and potential use of guided root canal treatment.
Torres A, Boelen GJ, Lambrechts P, Pedano MS, Jacobs R.
Int Endod J. 2021 May 15. doi: 10.1111/iej.13563. Epub ahead of print. PMID: 33991122.
2. ENDODONTIC RETREATMENT USING DYNAMIC NAVIGATION: A CASE REPORT.
Bardales-Alcocer J, Ramírez-Salomón M, Vega-Lizama E, López-Villanueva M, Alvarado-Cárdenas G, Serota KS, Ramírez-Wong J.
J Endod. 2021 Mar 18:S0099-2399(21)00157-6. doi: 10.1016/j.joen.2021.03.005. Epub ahead of print. PMID: 33745944.
3. Accuracy assessment of dynamic computer-aided implant placement: a systematic review and meta-analysis.
Jorba-García A, González-Barnadas A, Camps-Font O, Figueiredo R, Valmaseda-Castellón E.
Clin Oral Investig. 2021 Feb 26. doi: 10.1007/s00784-021-03833-8. Epub ahead of print. PMID: 33635397.
4. Accuracy of dynamic navigation in implant surgery: A systematic review and meta-analysis.
Wei SM, Zhu Y, Wei JX, Zhang CN, Shi JY, Lai HC.
Clin Oral Implants Res. 2021 Apr;32(4):383-393. doi: 10.1111/clr.13719. Epub 2021 Feb 18. PMID: 33540465.
5. Management of a Complex Case during COVID-19 Time Using One-day Digital Dentistry: A Case Report.
Stefanelli LV, Franchina A, Pagliarulo M, Burgess D, Patil S, Bhandi S, Nardo DD, Di Carlo S, Testarelli L, Gambarini G.
J Contemp Dent Pract 2020; 21 (11):1284-1292.
6. Accuracy of Dynamic Computer-Assisted Implant Placement: A Systematic Review and Meta-Analysis of Clinical and In Vitro Studies.
Schnutenhaus S, Edelmann C, Knipper A, Luthardt RG.
J Clin Med. 2021 Feb 11;10(4):704. doi: 10.3390/jcm10040704. PMID: 33670136; PMCID: PMC7916851.
7. Digital Approach for the Rehabilitation of the Edentulous Maxilla with Pterygoid and Standard Implants: The Static and Dynamic Computer-Aided Protocols.
Franchina A, Stefanelli LV, Gorini S, Fedi S, Lizio G, Pellegrino G.
Methods Protoc. 2020 Dec 21;3(4):84. doi: 10.3390/mps3040084. PMID: 33371232; PMCID: PMC7768480.
8. Validation of an Intra-Oral Scan Method Versus Cone Beam Computed Tomography Superimposition to Assess the Accuracy between Planned and Achieved Dental Implants: A Randomized In Vitro Study.
Franchina A, Stefanelli LV, Maltese F, Mandelaris GA, Vantaggiato A, Pagliarulo M, Pranno N, Brauner E, Angelis FD, Carlo SD.
International Journal of Environmental Research and Public Health. 2020; 17(24):9358.
9. Accuracy of Dynamic Navigation Surgery in the Placement of Pterygoid Implants.
Stefanelli LV, Graziani U, Pranno N, Di Carlo S, Mandelaris GA.
Int J Periodontics Restorative Dent. 2020 Nov/Dec;40(6):825-834. doi: 10.11607/prd.4605. PMID: 33151187.
10. Implant Placement Under Dynamic Navigation Using Trace Registration: Case Presentations.
Scheyer ET, Mandelaris GA, McGuire MK, AlTakriti MA, Stefanelli LV.
Int J Periodontics Restorative Dent. 2020 Nov/Dec;40(6):e241-e248. doi: 10.11607/prd.4479. PMID: 33151199.
11. Navigated Antral Bone Expansion (NABE): a prospective study on 35 patients with 4 months of follow-up post implant loading.
Stefanelli, L.V., Pranno, N., De Angelis, F. et al.
BMC Oral Health 20, 273 (2020). https://doi.org/10.1186/s12903-020-01268-3
12. Intraosseous Anesthesia using Dynamic Navigation Technology.
Jain SD, Carrico CK, Bermanis I, Rehil S.
[published online ahead of print, 2020 Sept 10]. J Endod. 2020; doi.org/10.1016/j.joen.2020.09.001
13. Dynamically Navigated versus Freehand Access Cavity Preparation: A Comparative Study on Substance Loss Using Simulated Calcified Canals. Jain SD, Saunders MW, Carrico CK, Jadhav A, Deeb JG, Myers GL.
J Endod. 2020 Aug 11:S0099-2399(20)30578-1. doi: 10.1016/j.joen.2020.07.032. Epub ahead of print. PMID: 32795551.
14. In Vitro Comparison of Time and Accuracy of Implant Placement Using Trephine and Conventional Drilling Techniques Under Dynamic Navigation
Deeb JG, Frantar A, Deeb GR, Carrico CK, Rener-Sitar K.
[published online ahead of print, 2020 Aug 11]. J Oral Implantol. 2020;10.1563/aaid-joi-D-19-00125. doi:10.1563/aaid-joi-D-19-00125
15. Accuracy of Dynamic Navigation System Workflow for Implant Supported Full Arch Prosthesis: A Case Series.
Stefanelli, L.V.; Mandelaris, G.A.; Franchina, A.; Pranno, N.; Pagliarulo, M.; Cera, F.; Maltese, F.; Angelis, F.D.; Carlo, S.D.
Int. J. Environ. Res. Public Health 2020, 17, 5038.
16. Computer-Aided Planning and Placement in Implant Surgery.
Deeb GR, Tran DQ, Deeb JG.
Atlas Oral Maxillofac Surg Clin North Am. 2020;28(2):53-58. doi:10.1016/j.cxom.2020.05.001
17. Accuracy Evaluation of 14 Maxillary Full Arch Implant Treatments Performed with Da Vinci Bridge: A Case Series.
Stefanelli LV, Mandelaris GA, Franchina A, et al.
Materials (Basel). 2020;13(12):E2806. Published 2020 Jun 22. doi:10.3390/ma13122806
18. Precision of dynamic navigation to perform endodontic ultraconservative access cavities: a preliminary in vitro analysis
Gambarini G, Galli M, Morese A, et al.
[published online ahead of print, 2020 Jun 15]. J Endod. 2020;S0099-2399(20)30385-X. doi:10.1016/j.joen.2020.05.022
19. Digital Design of Minimally Invasive Endodontic Access Cavity.
Gambarini G, Galli M, Morese A, Abduljabbar F, Seracchiani M, Stefanelli LV, Giovarruscio M, Di Nardo D, Testarelli L.
Appl. Sci. 2020, 10, 3513.
20. 3-Dimensional Accuracy of Dynamic Navigation Technology in Locating Calcified Canals.
Jain SD, Carrico CK, Bermanis I.
J Endod. 2020;46(6):839-845. doi:10.1016/j.joen.2020.03.014
21. Accuracy of a Novel Trace-Registration Method for Dynamic Navigation Surgery.
Stefanelli LV, Mandelaris GA, DeGroot BS, Gambarini G, De Angelis F, Di Carlo S.
Int J Periodontics Restorative Dent. 2020 May/Jun;40(3):427-435. doi: 10.11607/prd.4420. PubMed PMID: 32233198.
22. Preservation of Inferior Alveolar Nerve Using the Dynamic Dental Implant Navigation System.
Chen YT, Chiu YW, Peng CY.
J Oral Maxillofac Surg. 2020 Jan 22. pii: S0278-2391(20)30022-7. doi: 10.1016/j.joms.2020.01.007. [Epub ahead of print] PubMed PMID: 32061618.
23. Accuracy of dental implant placement via dynamic navigation or the freehand method: A split-mouth randomized controlled clinical trial.
Aydemir CA, Arisan V.
Clin Oral Implants Res. 2020;31(3):255‐263. doi:10.1111/clr.13563
24. Accuracy of Computer-Aided Dynamic Navigation Compared to Computer-Aided Static Procedure for Endodontic Access Cavities: An in Vitro Study.
Zubizarreta-Macho Á, Muñoz AP, Deglow ER, Agustín-Panadero R, Álvarez JM.
J Clin Med. 2020 Jan 2;9(1). pii: E129. doi: 10.3390/jcm9010129. PubMed PMID: 31906598; PubMed Central PMCID: PMC7019931.
25. Accuracy of Computer-Aided Dynamic Navigation Compared to Computer-Aided Static Navigation for Dental Implant Placement: An In Vitro Study.
Mediavilla Guzmán A, Riad Deglow E, Zubizarreta-Macho Á, Agustín-Panadero R, Hernández Montero S.
J Clin Med. 2019 Dec 2;8(12). pii: E2123. doi: 10.3390/jcm8122123. PubMed PMID: 31810351; PubMed Central PMCID: PMC6947513.
26. A Novel Application of Dynamic Navigation System in Socket Shield Technique.
Chen JT.
J Oral Implantol. 2019 Oct;45(5):409-415. doi:10.1563/aaid-joi-D-19-00072. Epub 2019 Aug 7. PubMed PMID: 31389753
27. Endodontic Microsurgery Using Dynamic Navigation System: A Case Report.
Gambarini G, Galli M, Stefanelli LV, Di Nardo D, Morese A, Seracchiani M, De Angelis F, Di Carlo S, Testarelli L.
DOI: https://doi.org/10.1016/j.joen.2019.07.010
28. Exploring training dental implant placement using computer-guided implant navigation system for predoctoral students: a pilot study.
Golob Deeb J, Bencharit S, Carrico CK, Lukic M, Hawkins D, Rener-Sitar K, Deeb GR.
Eur J Dent Educ. 2019 May 29. doi: 10.1111/eje.12447. [Epub ahead of print] PubMed PMID: 31141291.
29. Computer-aided dynamic navigation: a novel method for guided endodontics.
Chong BS, Dhesi M, Makdissi J.
Quintessence Int. 2019;50(3):196-202. doi: 10.3290/j.qi.a41921. PubMed PMID: 30773571.
30. Accuracy of a Dynamic Dental Implant Navigation System in a Private Practice.
Stefanelli LV, DeGroot BS, Lipton DI, Mandelaris GA.
Int J Oral Maxillofac Implants. 2019 January/February;34(1):205–213. doi: 10.11607/jomi.6966. Epub 2018 Dec 5. PubMed PMID: 30521660.
31. Accuracy and the role of experience in dynamic computer guided dental implant surgery: An in-vitro study.
Jorba-García A, Figueiredo R, González-Barnadas A, Camps-Font O, Valmaseda-Castellón E.
Med Oral Patol Oral Cir Bucal. 2019 Jan 1;24(1):e76-e83. doi: 10.4317/medoral.22785. PubMed PMID: 30573712; PubMed Central PMCID: PMC6344002.
32. Dynamic Navigation for Surgical Implant Placement: Overview of Technology, Key Concepts, and a Case Report.
Mandelaris GA, Stefanelli LV, DeGroot BS.
Compend Contin Educ Dent. 2018 Oct;39(9):614-621; quiz 622. Review. PubMed PMID: 30299111.
33. (2018) Research Concerning Abutment Placement Training using a Navigation System.
Taniguchi Y, Tsuzuki T, Kakura K, Yoneda M, Isshi K, et al.
Dentistry 8: 517. doi:10.4172/2161-1122.1000517.
34. Investigational Clinical Trial of a Prototype Optoelectronic Computer-Aided Navigation Device for Dental Implant Surgery.
Jokstad A, Winnett B, Fava J, Powell D, Somogyi-Ganss E.
Int J Oral Maxillofac Implants. 2018 May/Jun;33(3):679-692. doi: 10.11607/jomi.6351. PubMed PMID: 29763504.
35. Current state of the art of computer-guided implant surgery.
D’haese J, Ackhurst J, Wismeijer D, De Bruyn H, Tahmaseb A.
Periodontol 2000. 2017 Feb;73(1):121-133. doi: 10.1111/prd.12175. Review. PubMed PMID: 28000275.
36. Accuracy of a novel prototype dynamic computer-assisted surgery system.
Somogyi-Ganss E, Holmes HI, Jokstad A.
Clin Oral Implants Res. 2015 Aug;26(8):882-890. doi: 10.1111/clr.12414. Epub 2014 May 19. PubMed PMID: 24837492.
“REFERENCIAS AUTOMÁTICAS CON NAVIBITE”
DR. CRISTIAN DOCAMPO, VIGO, 2021
“ENDODONTIC MICROSURGERY OF AN ANATOMICALLY CHALLENGING ZONE USING DYNAMIC NAVIGATION”
DR PAULA VILLA, COLOMBIA, 2020
“DYNAMIC NAVIGATION BY INNOVATIVE REGISTRATION”
DR RICARDO HENRIQUES, PORTUGAL 2018
“DYNAMIC NAVIGATION FOR PRECISE IMPLANTATION IN CASES OF CRITICAL ANATOMY”
DR DAVID BURGESS, UNITED KINGDOM 2017
“FLAPLESS IMPLANT PLACEMENT WITH AN INTERNAL SINUS LIFT USING DYNAMIC GUIDED NAVIGATION”
NAHEED MOHAMED, DMD 2017
“DYNAMIC NAVIGATION IN FULLY EDENTULOUS MAXILLA”
PROF. DR HAKAN UYSAL & DR NOYAN BASAL, TURKEY 2017
“USE OF DYNAMIC NAVIGATION FOR DENTAL IMPLANT SURGERY”
DR. JAN D’HAESE GHENT UNIVERSITY MARCH, 2015
Cirugía en edéntulos, protocolo con minitornillos
Cirugía en edéntulos, protocolo con minitornillos
Grupo de estudios DNS (Dynamic Navigation Society)
Endodoncia con Navident
Importación Dicom y Workflow