
Microcirugía endodóntica guiada. Madrid. 26-27 Abril 2024.
Módulo 4: Microcirugía Endodóntica Guiada
Dra. Paula Villa
Dr. Adrián Lorenzo
Dra. Laura. Sierra
Dr. Jon Eskurza
Fecha: 26-27 Abril 2024
Lugar:
Paseo de La Habana 4, esc A -1
28036 Madrid
Objetivos:
- Reconocer las indicaciones, contraindicaciones y limitaciones de la microcirugía endodóntica guiada.
- Aprender a simplificar protocolos quirúrgicos con una adecuada planificación de cada caso.
- Identificar las situación anatómicas que indican el uso de guías quirúrgicas.
- Reconocer las diferencias entre los diferentes sistemas de navegación (estática vs dinámica), sus ventajas y desventajas.
- Aprender a planificar y ejecutar procedimientos quirúrgicos guiados
Viernes: Teoría
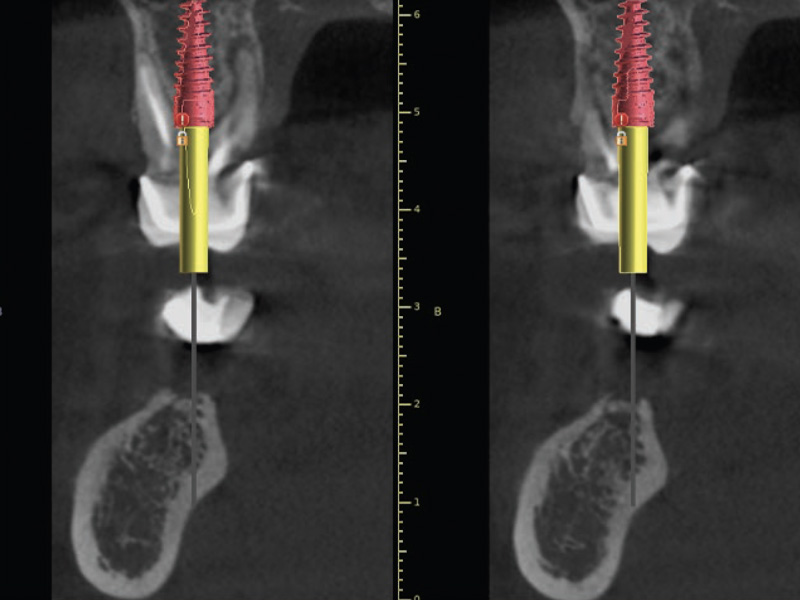
Cirugía apical guiada. Guía estática y dinámica. Navegación en cirugía apical.
- Principios y consideraciones básicas en microcirugía endodóntica: consideraciones anatómicas e indicaciones, de la microcirugía endodóntica guiada.
- Navegación estática en microcirugía endodóntica: generalidades.
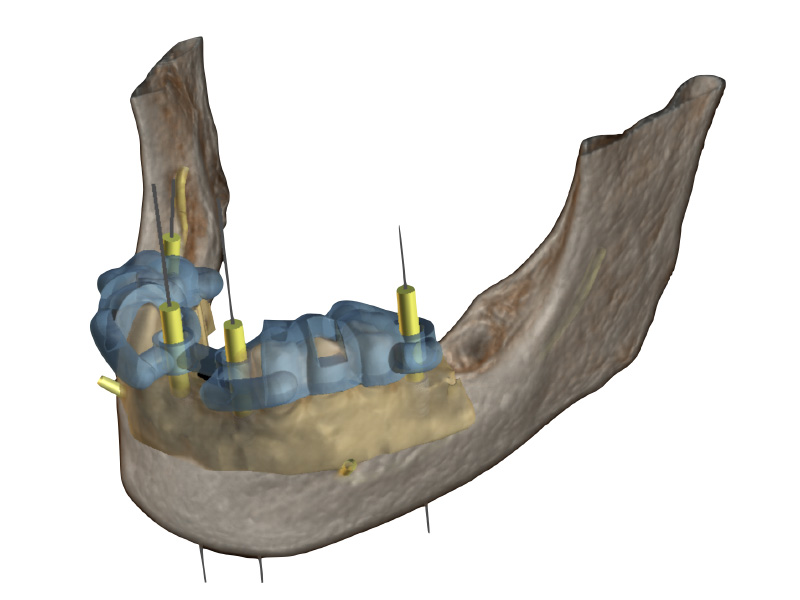
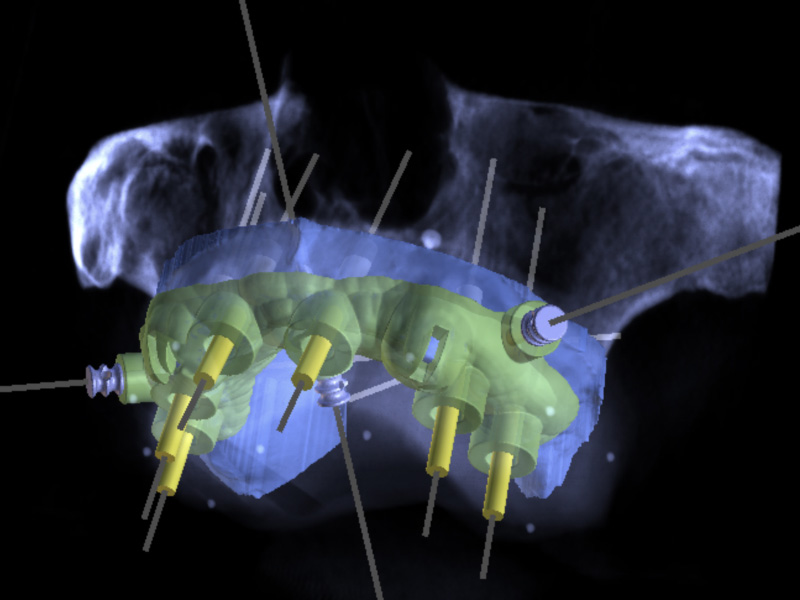
- Requisitos para el diseño y fabricación de las guías quirúrgicas.
- Tipos de guías estáticas para cirugía endodóntica, aplicación clínica.
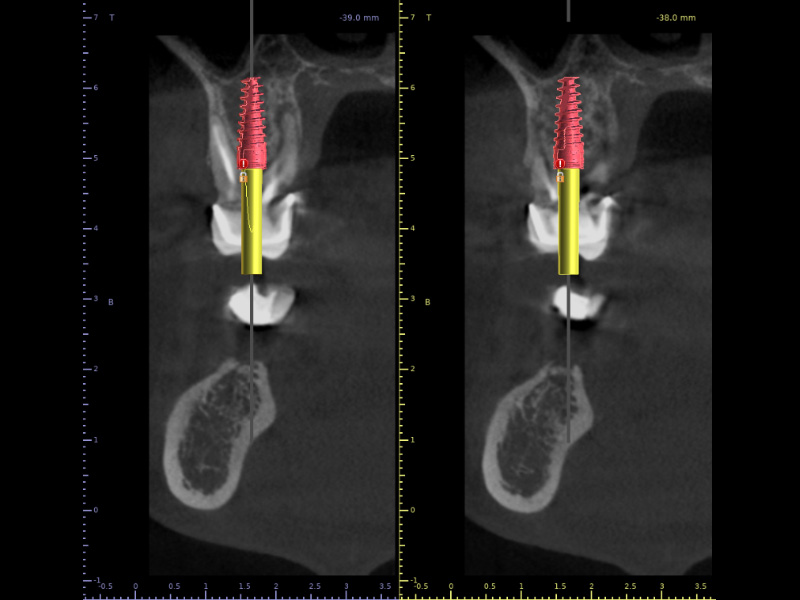
- Navegación dinámica.
- Abordajes guiados: trepanación y técnica de ventana cortical.
Sábado: Práctica
- Práctica preclínica microcirugía endodóntica guiada con navegación estática y dinámica (Navident): En ésta cada participante tendrá la oportunidad de realizar procedimientos endodónticos guiados con navegación estática y dinámica sobre biomodelos diseñados para este fin.
Taller con Navident UNO y EVO
Ponte en contacto para más información

Neobiotech World Symposium. Turquía. 20-21 Abril 2024.
Neobiotech World Symposium. 20-21 Abril 2024.



Fecha: 20-21 Abril 2024
Lugar:
Wyndham Grand Istanbul Levent
Estambul, Turquía
Hotel:
Wyndham Grand Istambul Levent [ver…]
Esentepe Mahallesi Büyükdere Street 177 183 Sisle
Istambul, Turquía 34394
Recursos Médicos te invita al Neo World Symposium:
viaje, hotel, inscripción…
Llámanos y te diremos como conseguirlo
Lista de ponentes

Programa


Resolución de Casos Borderline con Alineadores. 20 Abril 2024.

Resolución de Casos Borderline con Alineadores. Por qué Smartee…?
Dra. María del Pilar Pérez Rivera
Fecha:
Sábado 20 de Abril de 2024
9:00 a 19:00 horas
Modalidad:
Teoría y casos clínicos
Cupo: Limitado
Lugar: Hotel Clement Barajas
Av. General, 43
28042 Madrid
Consultas Teléfono 96.342.0478
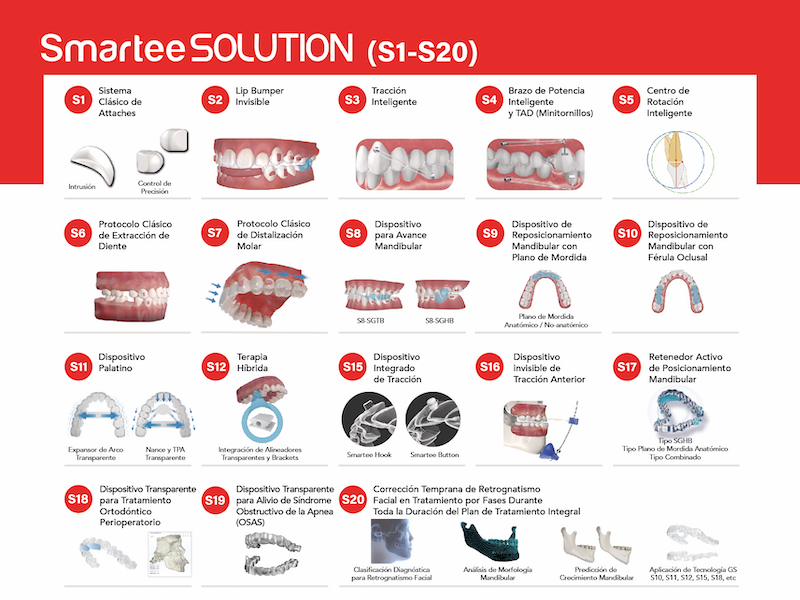
Smartee
La nueva era de tratamientos avanzados con alineadores transparentes.
Un enfoque para correcciones severas de overjet y overbite sin extracciones o cirugía
Programa
1. Qué es Smartee?
2. Tipos de Smartee
3. Smartee GS
– Crecimiento condilar con tratamiento S8
– Cambio del plano oclusal posterior con alineadores
– Bondades del GS para tratamiento de casos con microtornillos
– Bondades del GS para tratamiento temprano de Clase III
– Casos de Clase II y curva de Spee profunda
4. Casos clínicos de plataforma Smartee
5. Mi experiencia con Smartee
6. Como es el SmarteeCheck y la plataforma
7. Protocolo y tiempos de envío

Te puede interesar...


Expodental 2024. Madrid 14-16 Marzo 2024.
Expodental 2024
Fecha: del 14 al 16 de Marzo de 2024
Leer más: www.ifema.es
Lugar: IFEMA – Feria de Madrid
Av. Partenón, 5 – 28042 Madrid.
Visítanos!
Stand 8E11
Solicita tu entrada gratuita!
Mira las fotos...

































European Aligner Society 5th Congress. Valencia. 29-Feb al 2-Mar 2024.
European Aligner Society 5th Congress. Valencia. 29-Feb al 2-Mar 2024.

Fecha: 29-Feb al 2-Mar 2024.
Lugar:
Palacio de Congresos de Valencia
Ven a conocer Smartee!
Stand # 3G
Conferencia Prof. Gang Shen
A new orthopedic approach using clear appliances S8-SGTB and S8-SGHB to correct sever jaw discrepancies
Severe malocclusions with skeletal elements impose a challenge to the current orthodontic specialty. Simple appliances such as brackets with archwires may not address complicated skeletal defects due to their inadequate impact on bone structures. Orthopedic approaches have proven to be effective solutions to the skeletal anomalies. The specially designed and customized manufactured clear orthopedic appliances, including sagittally guided twin block (S8-SGTB), modified Herbst (S8-SGHB) and a variety of tailored clear appliances, are used to modify the growth patterns of the oral facial bone structures and therefore to correct jaw discrepancies efficiently and effectively. Radiographic evidence in condylar new bone formation generated by mandibular advancement inspires an encouraging impetus to orthopedic modalities. S8-SGTB and S8-SGHB also demonstrate promising efficacy in treating malocclusions concurring with TMD, due to their effects in provoking adaptive remodeling of TMJ condyles in response to mandibular repositioning. This lecture will present an overview on the latest advances in clinical orthodontics evidenced by a wealth of literature review and beautifully finished cases.
 Dr. Gang Shen D.B.S.
Dr. Gang Shen D.B.S.
Professor Gang Shen is now Executive Chairman of ByBo Dental Group and Presiden! of Shanghai ByBo Dental Hospital. Prof. Shen Obtained his BDS in 1988 and then MDSc (Orth) in 1991 from Shanghai Second Medical University (now Shanghai Jiao Tong University School of Medicine). In 2000, Dr. Shen was awarded Ph.D from the University of Hong Kong Faculty of Dentistry. In 1995, Dr. Shen was in Australia for advanced clinic training firstly with Dr. Brian Lee in Bendigo and then with Dr. Wayne Sampson in Adelaide. He was Chair Professor of Orthodontics Shanghai Jiao Tong University School of Stomatology from 2000 to 2004 before he moved to Australia taking up the full time academic position as Associate Professor of Orthodontics in University of Sydney Faculty of Dentistry. He was also appointed as orthodontic staff specialist treating patients in Sydney Dental Hospital and Westmead Hospital. He was given special permission by Australia Dental Board NSW to conduct extramural prívate practice. In June 2008, Dr. Shen returned to Shanghai and resumed his duty as Chair Professor of Orthodontics Shanghai Jiao Tong University School of Stomatology. Professor Shen’s importan! posts also included the Vice Dean of School of Stomatology Shanghai Jiao Tong University, Dean of Faculty of Dentistry, Presiden! of Shanghai Association of Orthodontists and Vice Presiden! of Chinese Orthodontic Society.



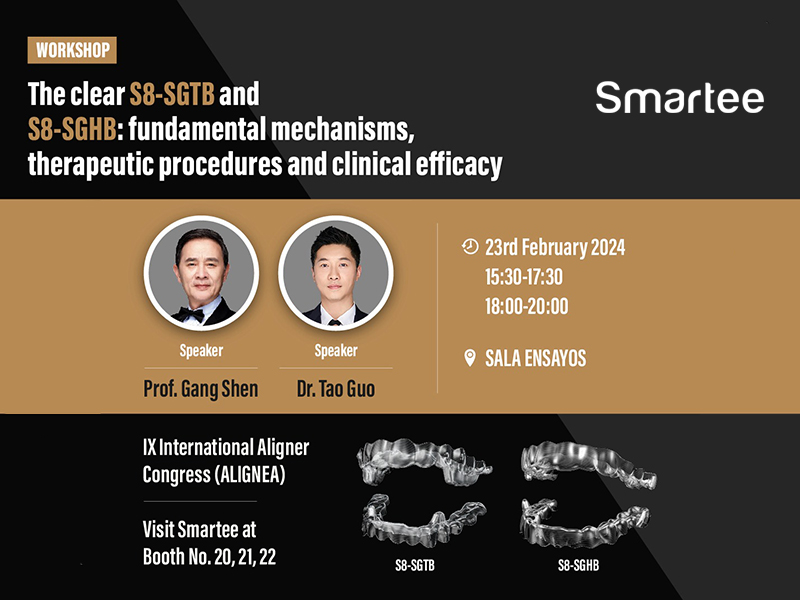
Workshop Smartee GS S8-SGTB. Prof. Shen Gang y Dr. Tao Guo. 23 Febrero 2024.

The clear S8-SGTB and S8-SGHB: fundamental mechanisms, therapeutic procedures and clinical efficacy.
Prof. Gang Shen, Dr. Tao Guo
Fecha:
23 de Febrero de 2024
15:30 a 17:30 y 18:00 a 20:00 horas
Sala Ensayos
Modalidad:
Workshop Gratuito
Cupo: Limitado
Idioma:
Inglés con traducción
Lugar:
Durante el iX Congreso Alignea en Salamanca
Consultas Teléfono 96.342.0478
The clear S8-SGTB and S8-SGHB: fundamental mechanisms, therapeutic procedures and clinical efficacy
Explore the new era of trading Class II cases without extractions or surgery
A new approach using clear aligners to correct severe increased overjets and deep overbites
Te puede interesar...

IX Congreso Internacional de Alineadores (Alignea). 22 al 24 Febrero 2024.
IX Congreso Internacional de Alineadores (Alignea). 22 al 24 de Febrero de 2024.

Conferencia Prof. Gang Shen
A new orthopedic approach using clear appliances S8-SGTB and S8-SGHB to correct sever jaw discrepancies
(Traducción simultánea)
Fecha: 22 al 24 de Febrero de 2024
Lugar:
Palacio de Congresos de Salamanca
Ven a conocer Smartee!
Stand #21

Apúntate gratis al Workshop y conoce más del Sistema GS
Conferencia Prof. Gang Shen
A new orthopedic approach using clear appliances S8-SGTB and S8-SGHB to correct sever jaw discrepancies
Severe malocclusions with skeletal elements impose a challenge to the current orthodontic specialty. Simple appliances such as brackets with archwires may not address complicated skeletal defects due to their inadequate impact on bone structures. Orthopedic approaches have proven to be effective solutions to the skeletal anomalies. The specially designed and customized manufactured clear orthopedic appliances, including sagittally guided twin block (S8-SGTB), modified Herbst (S8-SGHB) and a variety of tailored clear appliances, are used to modify the growth patterns of the oral facial bone structures and therefore to correct jaw discrepancies efficiently and effectively. Radiographic evidence in condylar new bone formation generated by mandibular advancement inspires an encouraging impetus to orthopedic modalities. S8-SGTB and S8-SGHB also demonstrate promising efficacy in treating malocclusions concurring with TMD, due to their effects in provoking adaptive remodeling of TMJ condyles in response to mandibular repositioning. This lecture will present an overview on the latest advances in clinical orthodontics evidenced by a wealth of literature review and beautifully finished cases.
Dr. Gang Shen D.B.S.
Professor Gang Shen is now Executive Chairman of ByBo Dental Group and Presiden! of Shanghai ByBo Dental Hospital. Prof. Shen Obtained his BDS in 1988 and then MDSc (Orth) in 1991 from Shanghai Second Medical University (now Shanghai Jiao Tong University School of Medicine). In 2000, Dr. Shen was awarded Ph.D from the University of Hong Kong Faculty of Dentistry. In 1995, Dr. Shen was in Australia for advanced clinic training firstly with Dr. Brian Lee in Bendigo and then with Dr. Wayne Sampson in Adelaide. He was Chair Professor of Orthodontics Shanghai Jiao Tong University School of Stomatology from 2000 to 2004 before he moved to Australia taking up the full time academic position as Associate Professor of Orthodontics in University of Sydney Faculty of Dentistry. He was also appointed as orthodontic staff specialist treating patients in Sydney Dental Hospital and Westmead Hospital. He was given special permission by Australia Dental Board NSW to conduct extramural prívate practice. In June 2008, Dr. Shen returned to Shanghai and resumed his duty as Chair Professor of Orthodontics Shanghai Jiao Tong University School of Stomatology. Professor Shen’s importan! posts also included the Vice Dean of School of Stomatology Shanghai Jiao Tong University, Dean of Faculty of Dentistry, Presiden! of Shanghai Association of Orthodontists and Vice Presiden! of Chinese Orthodontic Society.

Cirugía Guiada e Impresión 3D. Palma de Mallorca. 16-17 Febrero-2024.
Curso de Cirugía Guiada e Impresión 3D
Dr. Tal Grauer
Dr. Justo M. Balaguer
Fecha:
16 y 17 Febrero 2024
9:00 a 19:00 horas
Modalidad:
Teórico-Práctico. Presencial.
Cupo: Limitado
Lugar:
Clínica Dental Justo Balaguer
C/ Sant Joan de la Salle, 3
Palma de Mallorca
Consultas Teléfono 96.342.0478
Más información:
Dr. Tal Grauer 676.367.483
Se entregarán 6 exportaciones BlueSkyPlan gratis a cada asistente
Dirigido a:
Odontólogos y/o estomatólogos que quieran incorporar a su práctica clínica la cirugía implantológica guiada y la impresión 3D.
Uso de software gratuito y compatible con cualquier marca de implantes de elección del facultativo.
Objetivo:
Curso teórico-práctico de planificación digital e impresión 3D para la colocación precisa de implantes mediante cirugía guiada.
La información presentada es aplicable a cualquier sistema de implantes y prácticamente a la totalidad de situaciones clínicas.
El profesional aprenderá el paso a paso del flujo digital con BlueSkyPlan y los procedimientos de impresión 3D.
Programa:
CIRUGÍA GUIADA Y MESHMIXER
– Introducción a la odontología digital y cirugía guiada.
– Requisitos y ventajas.
– Tipos de cirugia guiada y de férulas quirúrgicas.
– Posibles fuentes de error.
– Kits de cirugía guiada disponibles en el mercado.
– Aspectos relevantes.
– Aplicación de software open source (BlueSkyPlan y Meshmixer).
HAND ON 1: Meshmixer
– Herramientas básicas
– Cierre de mallas
– Zocalado y ahuecado de modelos
– Instalación de librerías de dientes
– Encerados diagnósticos. Uso de Overlay2. Confección de provisionales
– Extracciones virtuales y mirroring
– Pilares customizados
CIRUGÍA GUIADA Y BLUESKYPLAN
– Férulas dentosoportadas: Flujos de trabajo digital en BSP
HANDS ON 2: Pacientes parcialmente desdentados
– Implantes unitarios
– Puente sobre implantes
– Implante inmediato
– Férulas mucosoportadas y óseosoportadas: Flujos de trabajo digital en BSP
HANDS ON 3: Pacientes totalmente desdentados con BlueSkyPlan
IMPRESIÓN 3D
– Conceptos básicos
– Tipos de impresoras 3D
– Impresoras dentales vs. impresoras genéricas
– Resolución XY y resolución Z
– Implementación de la impresión 3D en la clínica dental
– Procedimientos en impresión 3D
– Tipos de resinas: Principales marcas y aplicaciones
– Coste de la impresión
HANDS ON 4: Impresión 3D
– Partes de la impresora 3D y calibración eje Z
– Calibración de resinas
– Utilización del slicer
– Impresión de modelos y férulas
– Postprocesado
* El programa puede sufrir modificaciones en función de la evolución del curso
Material imprescindible:
Ordenador con procesador i7 o superior
Sistema operativo Windows 64bits
Memoria RAM 16 GB o superior
Tarjeta gráfica dedicada
Ratón 3 botones
Software: descarga de los sitios web:
Archivos de práctica: se aportan durante el curso



Te puede interesar...

BlueSkyPlan software para planificación
135,00 € – 3.500,00 € + IVA
Neo NaviGuide, cirugía guiada
2.800,00 € + IVA
Resolución de Casos Borderline con Alineadores. Madrid, 27 Enero 2024.
Resolución de Casos Borderline con Alineadores. Por qué Smartee…?
Dra. María del Carmen Pérez Cabrilla
Dra. María del Pilar Pérez Rivera
Fecha:
Sábado 27 de Enero de 2024
9:00 a 19:00 horas
Modalidad:
Teórica
Cupo: Limitado
Lugar: Hotel Clement Barajas
Av. General, 43
28042 Madrid
Consultas Teléfono 96.342.0478
Smartee
La nueva era de tratamientos avanzados con alineadores transparentes.
Un enfoque para correcciones severas de overjet y overbite sin extracciones o cirugía
Programa
1. Qué es Smartee?
2. Tipos de Smartee
3. Smartee GS
– Crecimiento condilar con tratamiento S8
– Cambio del plano oclusal posterior con alineadores
– Bondades del GS para tratamiento de casos con microtornillos
– Bondades del GS para tratamiento temprano de Clase III
– Casos de Clase II y curva de Spee profunda
4. Casos clínicos de plataforma Smartee
5. Mi experiencia con Smartee
6. Como es el SmarteeCheck y la plataforma
7. Protocolo y tiempos de envío
Te puede interesar...
Resolución de Casos Borderline con Alineadores. 2 Diciembre 2023.
Resolución de Casos Borderline con Alineadores. Por qué Smartee…?
Dra. María del Pilar Pérez Rivera
Fecha:
Sábado 2 de Diciembre de 2023
9:00 a 19:00 horas
Modalidad:
Teórica
Cupo: Limitado
Lugar: Hotel Clement Barajas
Av. General, 43
28042 Madrid
Consultas Teléfono 96.342.0478
Smartee
La nueva era de tratamientos avanzados con alineadores transparentes.
Un enfoque para correcciones severas de overjet y overbite sin extracciones o cirugía
Programa
1. Qué es Smartee?
2. Tipos de Smartee
3. Smartee GS
– Crecimiento condilar con tratamiento S8
– Cambio del plano oclusal posterior con alineadores
– Bondades del GS para tratamiento de casos con microtornillos
– Bondades del GS para tratamiento temprano de Clase III
– Casos de Clase II y curva de Spee profunda
4. Casos clínicos de plataforma Smartee
5. Mi experiencia con Smartee
6. Como es el SmarteeCheck y la plataforma
7. Protocolo y tiempos de envío